

E1.01 Crew Tracking for Analog Space Research

Sponsor: NASA - TSGC
Student Team: Delmar Moreno, Gerardo Martin, Jesse Gonzales, LaBrynthe Jean-Batiste
Faculty Advisor: Dr. Rich Compeau
Develop a prototype for a system that will track crew members movements throughout the HERA habitat. This system should be able to detect direction a crew member is facing and their location. This system should be passive and the crew member should only have to wear a small device.
E1.02 JFET Headphone Amplifier
Sponsor: Ingram School of Engineering
Student Team: Christopher Thomas, Jessica Wright, and Aldo Sanchez Alvarado
Faculty Advisor: Mr. Jeffrey Stevens
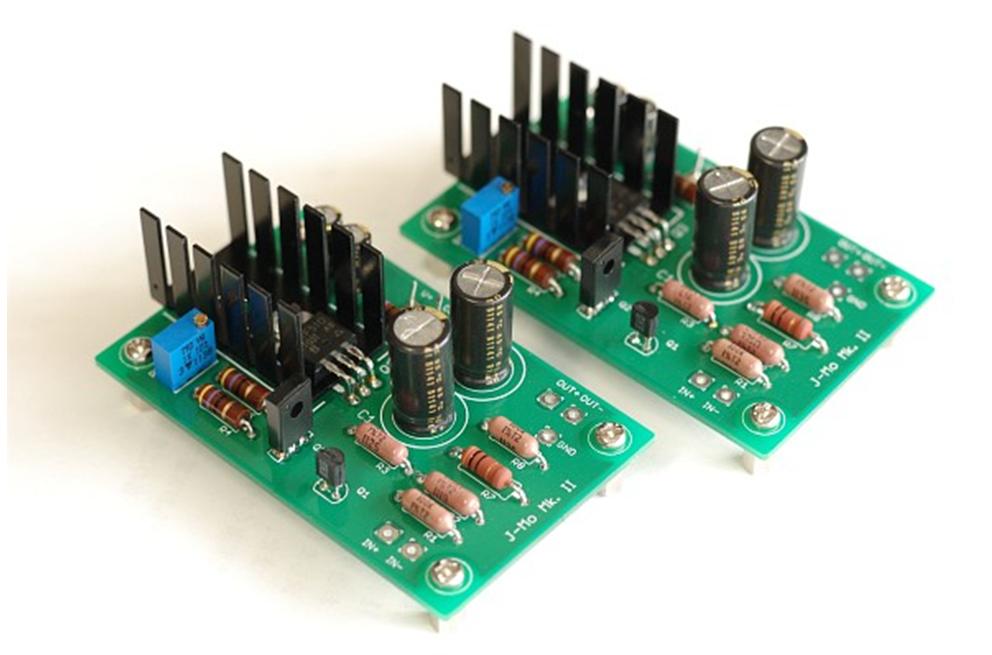
We will be designing and constructing a JFET amplifier, as well as a test jig that will allow for testing of components related to the JFET amplifier. We will then construct a vacuum tube amplifier and make a direct comparison between the JFET amplifier and the vacuum tube amplifier through Characterization testing. We will characterize the amplifiers by testing current draw, input/output impedance, signal to noise ratio, crosstalk, frequency response, slew rate, voltage gain, power output and total harmonic distortion.
E1.03 Robo Push-Pull
Sponsor: Ingram School of Engineering
Student Team: James Strong, Chadd Mingarine, Jacob Mitchell
Faculty Advisor: Mr. Jeffrey Stevens
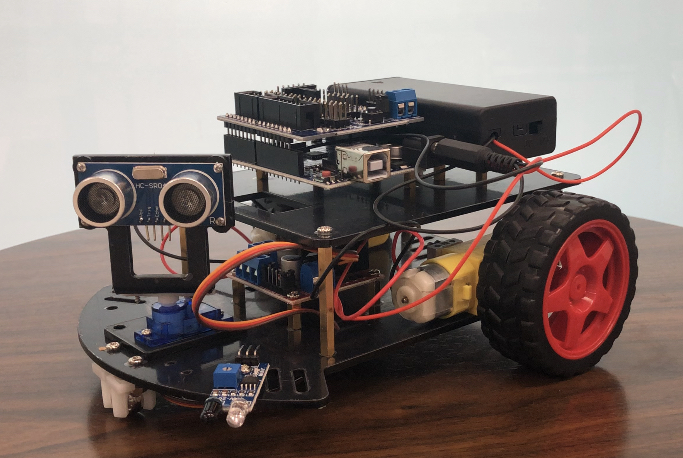
Our project is an autonomous robot that will be able to detect, push and pull objects. It utilizes an array of sensors that enable object/field detection to find and push an object in a straight line, pull an attached object, and compete against an opposing robot with the same capabilities in a sumo match.
E1.04 Robo-car team "Sumo ACE"
Sponsor: Ingram School of Engineering
Student Team: Esteban Padilla, Aric Easterling, Christopher Jenkins
Faculty Advisor: Mr. Jeffrey Stevens
Our product is an autonomous robot car designed to participate in both sumo and weighted sled pull competitions. In the sumo competition, the robot will navigate the dohyo competition ring, locate and push out a wooden block (D1) or opponent robot (D2) without exiting the ring itself. In the sled pull competition, the robot will be manually attached to either a wooden block (D1) or a weighted sled (D2) and will pull it as far as possible.