

E2.01 Radiation Tolerant GPU Architecture

Sponsor: NASA TSGC
Student Team: Connor Martin, Patrick Hornbeck, Eric Tejeda, Richard Medina
Faculty Advisor: Mr. Mark Welker
The project under development by Team Photon is centered around creating a proof-of-concept graphics processing unit which can withstand some of the common errors associated with ionizing radiation during deep-space travel, such as single event upsets and single event latch-ups. The unit is based on consumer-off-the-shelf products and uses error correction/mitigation algorithms which are tested through a software-based error injection system. The project is intended to be a scalable system able to work with varying resolutions and is a step in the direction of radiation-hard graphics units.
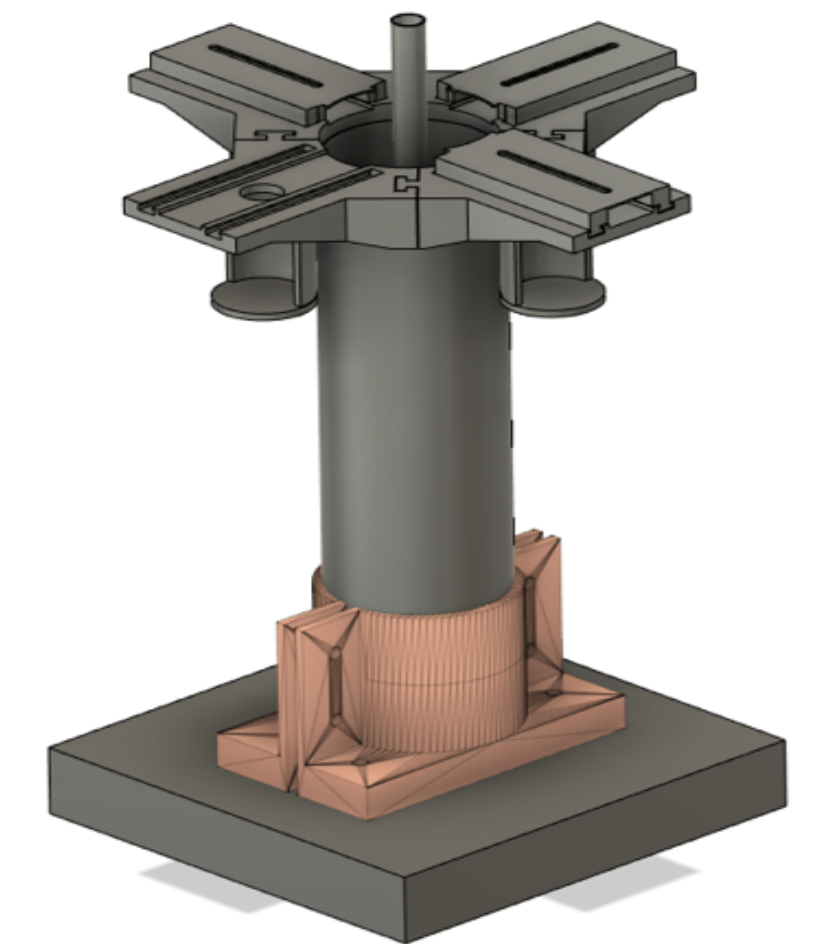
E2.02 Vortex One

Sponsor: Dr. Rich Compeau
Student Team: Zachary Trascher, Matthew Crain, Ryan Middleton, Grant Page
Faculty Advisor: Fawzi Behmann
Electricity is generated from a phenomenon called vortex shedding where low-pressure zones are created on either side of a blunt object causing it to oscillate. Using linear alternators, this oscillatory motion is used to generate electricity. Contemporary wind turbines have rotary alternators that can fail and need to be served periodically. Ours only has a single bending rob that experiences wear over time. Traditional wind turbines also need to be placed a minimum distances apart, but vortex generators can be placed much closer together.
E2.03 Power Shake
Sponsor: Mr. Fawzi Behmann
Student Team: Kayla Adderley, Ryan Fassnidge, Skylar Roath, Aaron Holley
Faculty Advisor: Dr. Rich Compeau
Wind Vortex generator is a project that’s goal is to produce power. The project converts vibrational motion produced by the wind into electrical energy. The project will then proceed to store the energy generated into a battery which can support charging accessories compatible with USB 3. Alternatively, to the traditional windmill (rotational motion) style generators, the Wind Vortex generator implements a rocking motion. The benefit of the rocking motion compared to the rotational motion, is the minimal risk to wildlife and a more ergonomic design compatible in more locations.
E2.04 Audio Mixer and PA System

Sponsor: Mr. Mark Welker
Student Team: Jason Farrell, Mohammed Aldulaimi, Mohanad Rashad, Jesus Rivera III
Faculty Advisor: Dr. C. Rich Compeau
The PA system will be designed for a user to input up to six separate channels to produce an audio output. The system will include a mixer to allow the user to adjust all inputs to produce a desired output. The user will also be able to connect a wireless device to the speaker using Bluetooth. A stereo line out will also provide the user with the ability to output the adjusted input signals to a separate speaker system of their choice.
E2.05 Hoover Headphones

Sponsor: Dr. Richard Compeau
Student Team: Rolando Garcia, Dane Gonzalez, Jose Salinas, Daniel Sparrow
Faculty Advisor: Mr. Jeff Stevens
Our project is a headphone amplifier that combines vacuum-tube and solid-state circuitry and allows tone shaping of the audio signal. The device will amplify an audio signal, provide control for the output volume level, allow the user to boost or cut bass and treble frequency bands, and drive headphones of various impedances. The system will be heavily characterized and the results data will be provided with the final product.
E2.06 Penbot
Sponsor: Lee Hinkle
Student Team: Thomas Denning, Chris Le, Diego Garcia-Mendez
Faculty Advisor: Mark Welker
Team Penbot 1 will demonstrate an autonomous robot that will be able to draw from a set of pictures autonomously. The Penbot will have Bluetooth capabilities that enable wireless remote-control functionality through a mobile application.
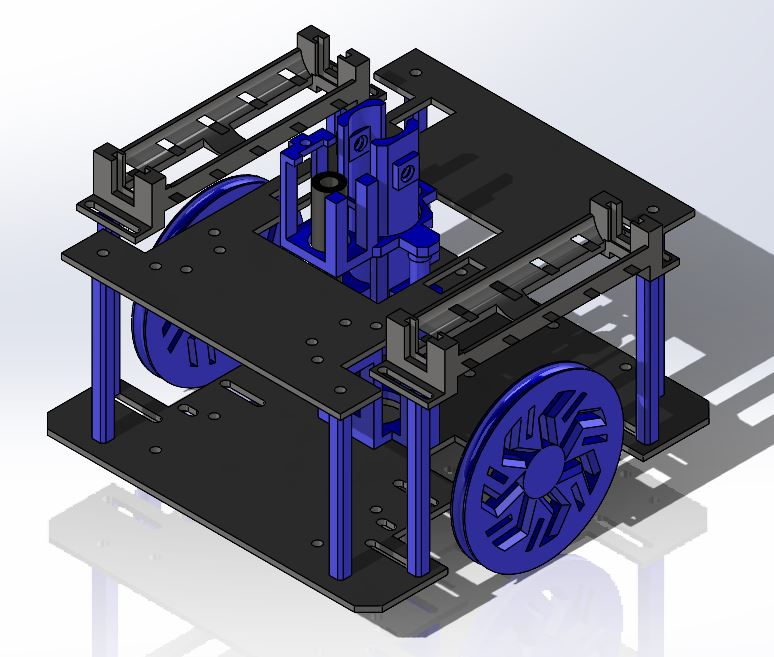
E2.07 PenBot
Sponsor: Mr. Lee Hinkle
Student Team: Annika Lopez, Julian Perez, Uyen Nguyen
Faculty Advisor: Mark Welker
Our PenBot product is a small autonomous vehicle which moves precisely on a flat poster board or whiteboard surface while creating line drawings. The PenBot’s movement is software controlled to first create simple shapes such as a circle, square, and triangle, and then progress to abstract, portrait, geometric and landscape drawings. The robot will be equipped with Wifi capabilities to allow for a digital user interface with drawing select and motion control features when it is not in its autonomous mode.